In My Corner
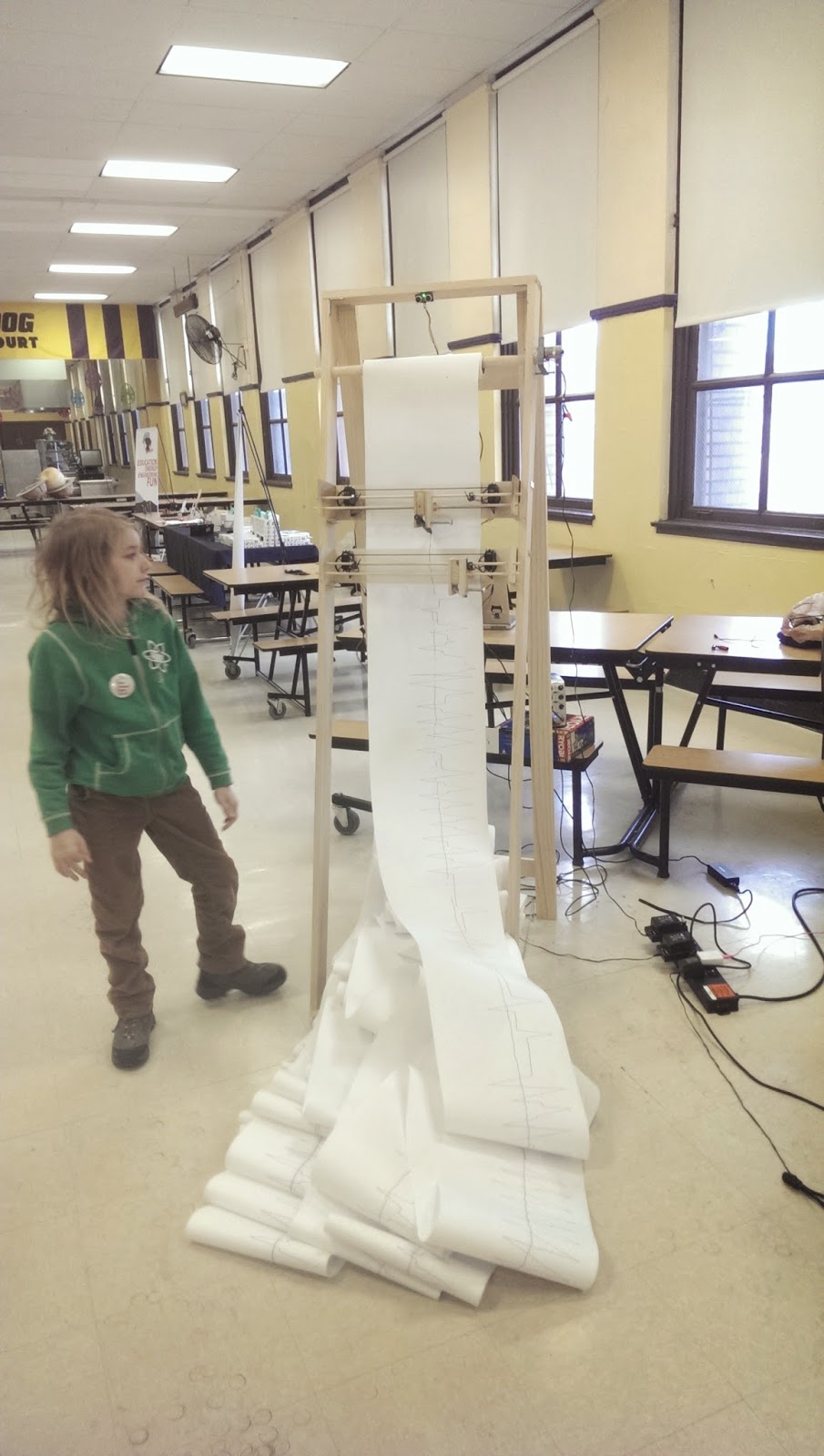 |
| At the Maker Faire |
In My Corner is a project that I made for the class. The major components consist of a wooden frame, 4 servo motors, 2 Arduinos, a microphone, a roll of paper, an audio interface to amplify the microphone, an RC motor to control the roll of paper, a ping))) sensor, and two markers.
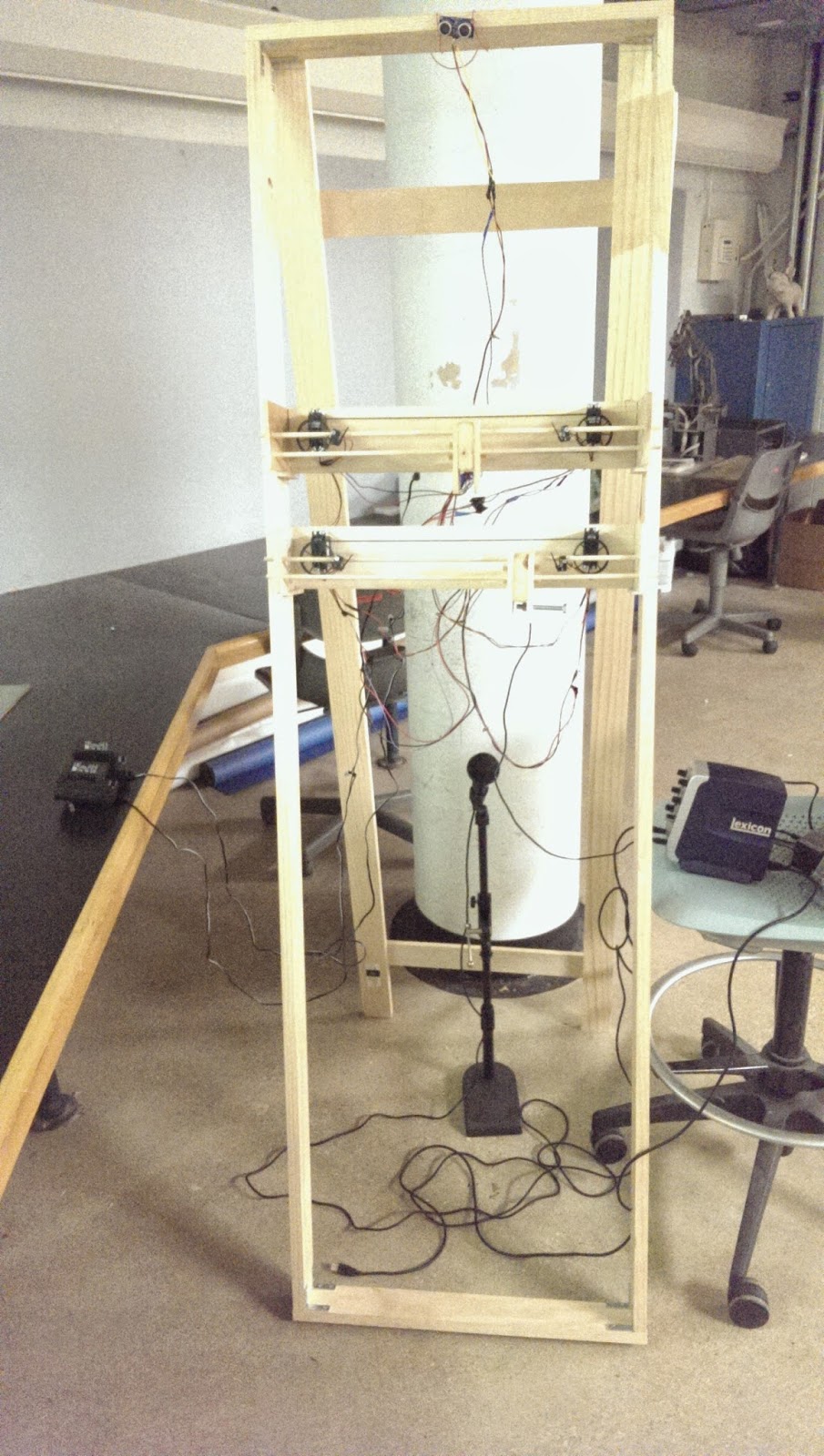 |
| Without the paper |
The purpose of this project was to create a machine that would record sound and distance to the machine and display it. This was meant to show the “emotions” of the machine and also served as a visual representation of the way people interacted with the machine. As people got closer to the machine and as the room became louder, the machine would draw lines with a bigger amplitude.
Code: drawingByDistance
/**
drawingByDistance
Author: Carlos Ortega
This code is used to move two motors at the same time using the distance measured by the PING))) sensor
We also have three butons that are used for calibration.
*/
#include <Servo.h>
//the pins that correspond to the buttons
const int leftButton = 2;
const int rightButton = 3;
const int stopButton = 4;
//the pin that corresponds to the PING)))
const int pingPin =7;
const int maxDist = 70; //in inches
const int minDist = 30; //also in inches
//servo vars
Servo myservo;
int leftOrRight = -1; //-1 = left, 1=right
const int maxDrawTime = 800; //max time for each line in millisecs.
//this corresponds to the max amplitude of the line
//vars for buttons
int leftState = 0;
int rightState = 0;
int start = -1;
int startStatus = 0;
//vars for PING)))
long pingTime = 0.0;
int inchDistance = 0;
void setup(){
myservo.attach(9); //attaches the servo to the pwm in pin 9
pinMode(leftButton, INPUT); //initialize the push button as inputs
pinMode(rightButton, INPUT);
pinMode(stopButton, INPUT);
// //debug stuff
// Serial.begin(9600);
}
void loop(){
leftState = digitalRead(leftButton);
rightState = digitalRead(rightButton);
startStatus = digitalRead(stopButton);
if(startStatus == HIGH)
start = start*-1;
//Do normal routine of checking distance and what not
if( start > 0 ){
//debugggg life
Serial.println(“in normal”);
//Pulse out
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
//read pulse back
pinMode(pingPin, INPUT);
pingTime = pulseIn(pingPin, HIGH);
//convert that s**t to inches and cast it as an int yeah! and constrain it and then map it
inchDistance = constrain( (int) timeToInches(pingTime), minDist, maxDist);
inchDistance = map(inchDistance, minDist, maxDist, maxDrawTime, 0);
inchDistance = inchDistance – inchDistance%100;
//More debug things
Serial.println(inchDistance);
if(inchDistance >= 100){
// //debug stuff dont pay attention
// Serial.println(“i shouldnt be here!”);
//move those motors
moveMotors(inchDistance);
delay(100);
}
}
//manual movements using the buttons used for calibration
else if ( start < 0){
// //More debug, not important
// Serial.println(“in calib”);
// Serial.println(start);
//turn left
if(leftState == HIGH && rightState == LOW){
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(100);
myservo.writeMicroseconds(1500); //stop
// //Deeeebug stuff!
// Serial.println(“left”);
}
//turn right
else if(leftState == LOW && rightState == HIGH){
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
delay(100);
myservo.writeMicroseconds(1500); //stop
// //deeeeeeeeeebug!
// Serial.println(“right”);
}
}
}//end of loop()
//taken directly from the Ping example on:http://www.arduino.cc/en/Tutorial/Ping
//because it makes my life esier
long timeToInches(long microsecs){
// According to Parallax’s datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microsecs / 74 / 2;
}
void moveMotors(int time){
// go left
if(leftOrRight < 0){
myservo.writeMicroseconds(1300); //turn motor clockwise
for(int x =0; x< time; x++){
if(digitalRead(rightButton) == 1){
returnToCenter(1);
//update leftOrRight
leftOrRight = leftOrRight * -1;
return;
}
delay(1);
}
myservo.writeMicroseconds(1500); //stop
delay(100);
//return to original pos
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
delay(time);
myservo.writeMicroseconds(1500); //stop
}
//go right
else if(leftOrRight > 0){
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
for(int x = 0; x < time; x++){
if(digitalRead(leftButton) == 1){
returnToCenter(-1);
//update leftOrRight
leftOrRight = leftOrRight * -1;
return;
}
delay(1);
}
myservo.writeMicroseconds(1500); //stop
delay(100);
//return to original position
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(time);
myservo.writeMicroseconds(1500); //stop
}
//update leftOrRight
leftOrRight = leftOrRight * -1;
// //More debug, not important
// Serial.println(leftOrRight);
// Serial.println(time);
}
void returnToCenter(int goLR){
//go left
if(goLR < 0){
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(maxDrawTime);
myservo.writeMicroseconds(1500); //stop
}
else if(goLR > 0){
myservo.writeMicroseconds(1700); //turn motor clockwise
delay(maxDrawTime);
myservo.writeMicroseconds(1500); //stop
}
}
Code: drawingByNoise
/**
drawingByNoise
Author: Carlos Ortega
This code is used to control two motors based in the input from a mic
We also have three buttons used for calibration
*/
#include <Servo.h>
//the pins that correspond to the buttons
const int leftButton = 2;
const int rightButton = 3;
const int stopButton = 4;
//servo vars
Servo myservo;
int leftOrRight = -1; //-1 = left, 1=right
int maxDrawTime = 1150; //max time for each line in millisecs.
//this corresponds to the max amplitude of the line
int sensorPin = A0; // select the input pin for the mic
int volume = 0; // variable to store the volume level value coming from the sensor
int delayTime = 100;
//vars used for volume array
const int arraySize = 50;
int count = 0;
int average = 0;
int readVals[arraySize];
int lowTresh = 0;
int midTresh = 0;
int highTresh = 0;
int higherTresh = 0;
float percentDiff = .50;
//vars for buttons
int leftState = 0;
int rightState = 0;
int start = -1;
int startStatus = 0;
void setup() {
Serial.begin(9600);
myservo.attach(9); //attaches the servo to the pwm in pin 9
pinMode(leftButton, INPUT); //initialize the push button as inputs
pinMode(rightButton, INPUT);
pinMode(stopButton, INPUT);
for (int x = 0; x < arraySize; x++)
readVals[x] = volume = analogRead(sensorPin);
}
void loop() {
leftState = digitalRead(leftButton);
rightState = digitalRead(rightButton);
startStatus = digitalRead(stopButton);
if(startStatus == HIGH)
start = start*-1;
//manual movements using the buttons used for calibration
if ( start < 0){
//turn left
if(leftState == HIGH && rightState == LOW){
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(100);
myservo.writeMicroseconds(1500); //stop
}
//turn right
else if(leftState == LOW && rightState == HIGH){
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
delay(100);
myservo.writeMicroseconds(1500); //stop
}
}
else if(start > 0){
//store val into the array
if(count >= arraySize)
count = 0;
readVals[count] = analogRead(sensorPin);
count ++;
//get average
int sum = 0;
for(int x = 0; x < arraySize; x++){
sum = readVals[x] + sum;
}
average = sum/arraySize;
volume = 0;
for(int x = 0; x < arraySize; x++)
volume = volume + analogRead(sensorPin);
volume = volume/(arraySize);
if(volume > average){
for (int x = 0; x < arraySize; x++)
readVals[x] = volume = analogRead(sensorPin);
sum = 0;
for(int x = 0; x < arraySize; x++){
sum = readVals[x] + sum;
}
average = sum/arraySize;
}
lowTresh = average * (1 + (percentDiff * 1));
midTresh = average * (1 + (percentDiff * 2));
highTresh = average * (1 + (percentDiff * 3));
higherTresh = average * (1 + (percentDiff * 4));
volume = 0;
for(int x = 0; x < 50; x++)
volume = volume + analogRead(sensorPin);
volume = volume/(20);
if(volume <= lowTresh){
Serial.println(“Here1”);
}
else if(volume > lowTresh && volume < midTresh && midTresh != 0){
moveMotors(maxDrawTime/4);
Serial.println(“here2”);
}
else if(volume >= midTresh && volume < highTresh && (midTresh-highTresh)!= 0){
moveMotors(maxDrawTime/2);
Serial.println(“here3”);
}
else if(volume >= highTresh && volume < higherTresh && highTresh != 0){
moveMotors((maxDrawTime*3)/4);
Serial.println(“here4”);
}
else if(volume >= higherTresh && higherTresh != 0){
moveMotors(maxDrawTime);
Serial.println(“here5”);
}
Serial.print(average);
Serial.print(“t”); //prints a tab
Serial.print(“t”); //prints a tab
Serial.print(volume);
Serial.print(“t”); //prints a tab
Serial.print(“t”); //prints a tab
Serial.print(lowTresh);
Serial.print(“t”); //prints a tab
Serial.print(“t”); //prints a tab
Serial.print(midTresh);
Serial.print(“t”); //prints a tab
Serial.print(“t”); //prints a tab
Serial.print(highTresh);
Serial.println(maxDrawTime + ” HELLLOOOO”);
delay(delayTime);
}
}
void moveMotors(int time){
// go left
if(leftOrRight < 0){
myservo.writeMicroseconds(1300); //turn motor clockwise
for(int x =0; x< time; x++){
if(digitalRead(rightButton) == 1){
returnToCenter(1);
//update leftOrRight
leftOrRight = leftOrRight * -1;
return;
}
delay(1);
}
myservo.writeMicroseconds(1500); //stop
delay(100);
//return to original pos
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
delay(time);
myservo.writeMicroseconds(1500); //stop
}
//go right
else if(leftOrRight > 0){
myservo.writeMicroseconds(1700); //turn motor counter-clockwise
for(int x = 0; x < time; x++){
if(digitalRead(leftButton) == 1){
returnToCenter(-1);
//update leftOrRight
leftOrRight = leftOrRight * -1;
return;
}
delay(1);
}
myservo.writeMicroseconds(1500); //stop
delay(100);
//return to original position
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(time);
myservo.writeMicroseconds(1500); //stop
}
//update leftOrRight
leftOrRight = leftOrRight * -1;
// //More debug, not important
// Serial.println(leftOrRight);
// Serial.println(time);
}
void returnToCenter(int goLR){
//go left
if(goLR < 0){
myservo.writeMicroseconds(1300); //turn motor clockwise
delay(maxDrawTime);
myservo.writeMicroseconds(1500); //stop
}
else if(goLR > 0){
myservo.writeMicroseconds(1700); //turn motor clockwise
delay(maxDrawTime);
myservo.writeMicroseconds(1500); //stop
}
}