For my final project, I would like to build an Arduino Robot, “Butler Bot”. This idea came to me when I was doing my 2nd project of the semester, “Find my iPhone”. The function of this robot is to move from one place to another, with the capability of avoiding any obstructions that might be in its way. A will serve as a sort of home for the wiring, as to make it look as effortless as possible.
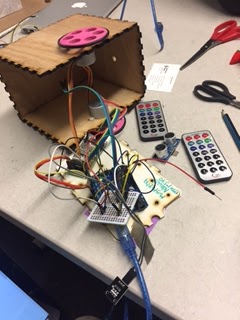
The functionalities include a ultrasonic sensor, which will allow the robot to navigate freely without anything blocking its movement or interfering with its set directions. A remote will be used to navigate the robot, with the various buttons being assigned to different directions. 1= ON/OFF, 2=Right, 3=Left, 4=Backward, 5=Forward, 6=spin, etc.
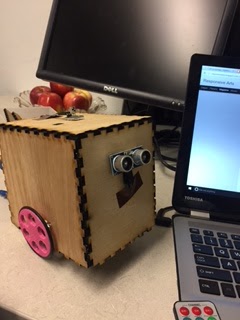
The robot is sturdy enough to carry items, which is why I affectionately named it “Butler Bot”. The wooden exterior housing allows for items to be placed on top of the robot, so if you’re in the living room and need a drink, you can send the robot into the kitchen and whom ever is in there could send a drink your way with ease and convenience. Of course that’s just an example from my lazy mind, there are many other creative uses for the robot, it all just depends on how imaginative the user is.
MATERIALS:
-wood
-arduino
-ultrasonic sensor
-remote control
-IR receiver
-3Mohm resistor
-lots of jumper cable
-breadboard
-a pair of wheels
-drill
-bolts and nails
-servo motors
-9volt battery
-tape
-LED Light
CODE (Final):
#include <IRremote.h>
#include <Stepper.h>
const int irReceiverPin = 7;
//const int ledPin = 13;
const int stepsPerRevolution = 512; // change this to fit the number of steps per revolution for your motor
int ctr = 0; //counter for button presses
const int trigPin = 13;
const int echoPin = 8;
int max_Distance = 4;
float inches;
int x= 0;
//float cm;
// initialize the stepper library on pins 8 through 11:



 For my final project, I would like to build an Arduino Robot, “Butler Bot”. This idea came to me when I was doing my 2nd project of the semester, “Find my iPhone”. The function of this robot is to move from one place to another, with the capability of avoiding any obstructions that might be in its way. A will serve as a sort of home for the wiring, as to make it look as effortless as possible.
For my final project, I would like to build an Arduino Robot, “Butler Bot”. This idea came to me when I was doing my 2nd project of the semester, “Find my iPhone”. The function of this robot is to move from one place to another, with the capability of avoiding any obstructions that might be in its way. A will serve as a sort of home for the wiring, as to make it look as effortless as possible.