Interactive Mirror
-Materials:
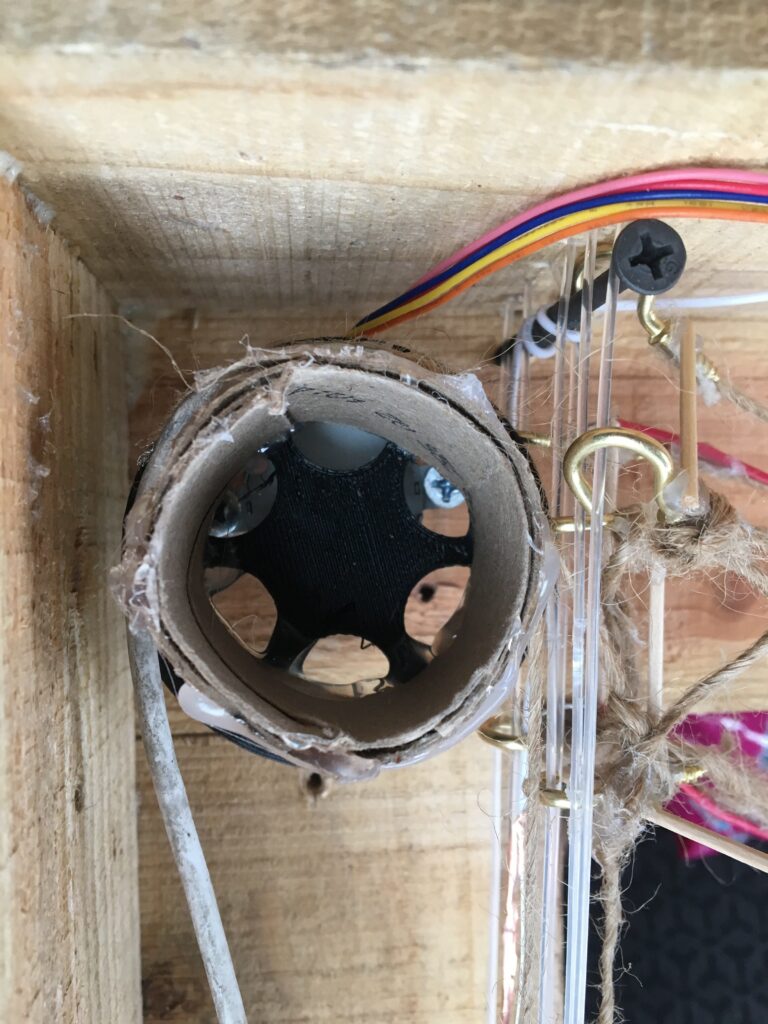
- Wood
- Glass
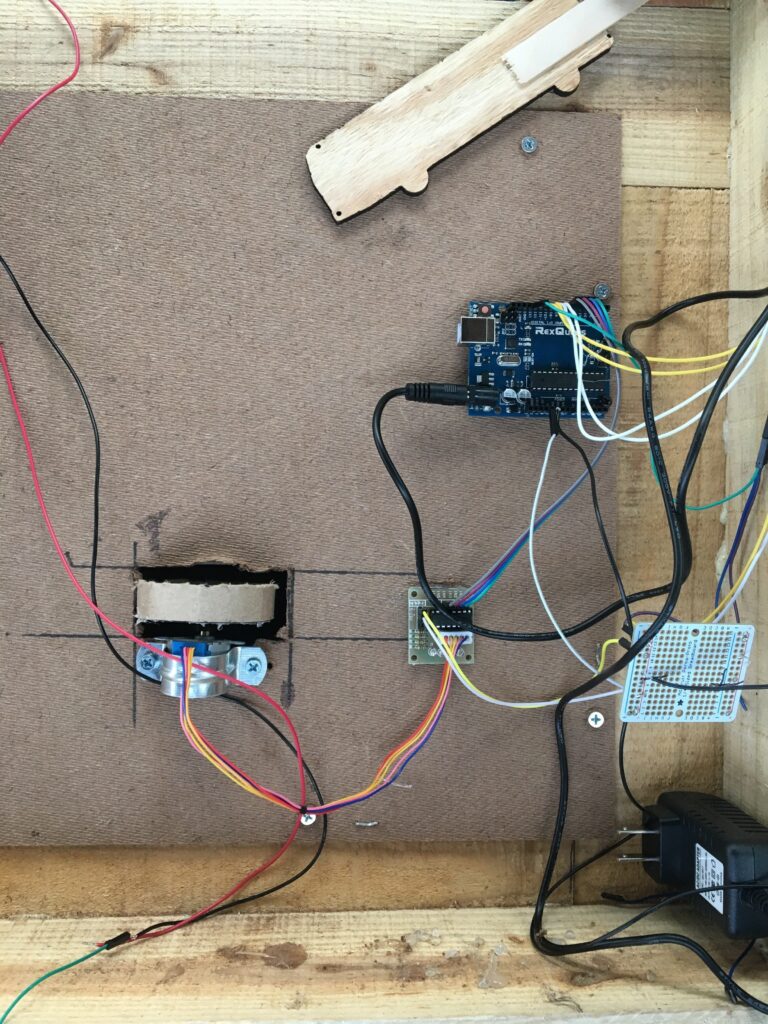
- Servo
- Motor Stepper
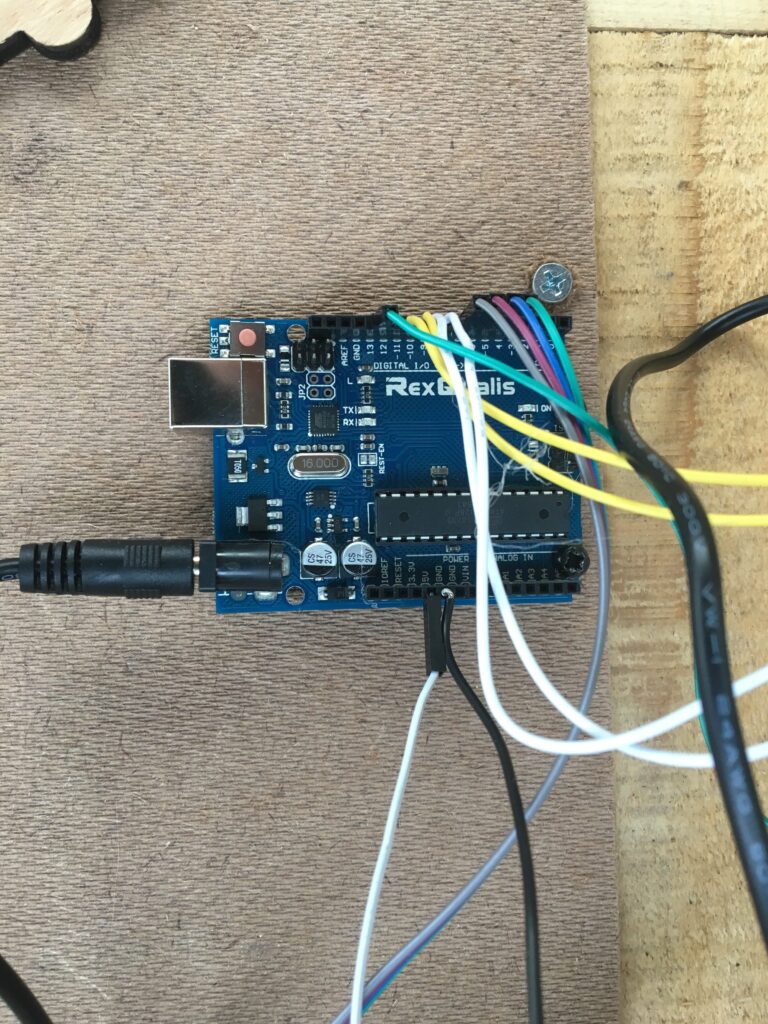
- Arduino
- Wire
- Proto Board



Code:
int PULSADOR = 2; //BOTON
int MOTOR=3;
int estado=LOW;
#include <Servo.h> //SERVO
Servo name_servo;
int servo_position = 0;
#include <Stepper.h> //MOTOR 1
Stepper motor1(2048,8,10,9,11); //pasos completos
Stepper motor2(2048,4,5,6,7); //pasos completos //MOTOR 2
void setup (){
motor1.setSpeed(3); // en RPM (valores de 1,2 o 3 para 28BYJ-48) //MOTOR 1
motor2.setSpeed(3); // en RPM (valores de 1,2 o 3 para 28BYJ-48) //MOTOR 2
pinMode(PULSADOR,INPUT_PULLUP); //BOTON
pinMode(MOTOR,OUTPUT);
digitalWrite(MOTOR,LOW);
name_servo.attach (12); //SERVO
}
void loop() {
for(servo_position = 0; servo_position <=180; servo_position +=1){ //SERVO
name_servo.write (servo_position);
delay(10);
}
for (servo_position=180; servo_position >=0; servo_position -=1){
name_servo.write (servo_position);
delay(10);
}
motor1.step(2048); //cantidad de pasos //MOTOR 1
delay(2000);
motor1.step(-2040); //cantidad de pasos
delay(2000);
motor2.step(2048); //cantidad de pasos //MOTOR 2
delay(2000);
motor2.step(2040); //cantidad de pasos
delay(2000);
while(digitalRead(PULSADOR)==LOW); //BOTON
estado = digitalRead(MOTOR);
digitalWrite(MOTOR,!estado);
while(digitalRead(PULSADOR)==HIGH);